Na płytach Rev4 i nowszych Nano ma czujnik ruchu (IMU), który mierzy przechył i obrót podczas lotu. Kalibrowanie go uczy Nano, jak wygląda "poziomo i nieruchomo" dla Twojej konkretnej płyty, co utrzymuje dokładność danych orientacji i kąta. Zajmuje to kilka minut i trzeba to zrobić tylko raz, choć możesz powtórzyć to w dowolnym momencie.
iINFORMACJA
Kalibrowanie dotyczy tylko płyt Rev4 i nowszych, tych z zainstalowanym IMU. Płyty Rev3 i starsze nie mają czujnika ruchu, więc nie ma nic do kalibrowania i nie ma pliku kalibracji na dysku.
Podłącz Nano przez USB, aby jego dysk się pojawił, a następnie otwórz plik device_calibration.txt. Zmień 0 w pierwszej linii na 1, zapisz plik i bezpiecznie wysuń dysk. Kalibrowanie uruchomi się przy następnym włączeniu Nano.
Ponieważ będziesz obracać płytę w kilka pozycji, najłatwiej jest uruchomić to na zasilaniu z baterii, aby kabel nie przeszkadzał: ustaw flagę na 1, wysuń dysk i odłącz, a następnie włącz Nano. Natychmiast rozpoczyna kalibrowanie zamiast przygotowania do lotu i automatycznie ustawia pierwszą linię z powrotem na 0 po zakończeniu. Najpierw żyroskop, a potem akcelerometr, a dioda LED prowadzi Cię przez oba.
Żyroskop wymaga tylko, aby płyta była całkowicie nieruchoma. Dioda świeci się na czerwono i masz kilka sekund, aby się odsunąć, a następnie zbiera odczyty przez około dziesięć do piętnastu sekund. Połóż Nano na czymś solidnym i wolnym od wibracji i nie dotykaj go. Najlepiej jest to zrobić z Nano położonym w orientacji, w której zamierzasz latać.
Jeśli wykryje jakikolwiek ruch, ostrzeże Cię pomarańczowym światłem. Jeśli tak się stanie, pozwól mu się skończyć, a następnie uruchom kalibrowanie ponownie. Gdy żyroskop się skończy, miga zielono trzy razy i przechodzi do akcelerometru.
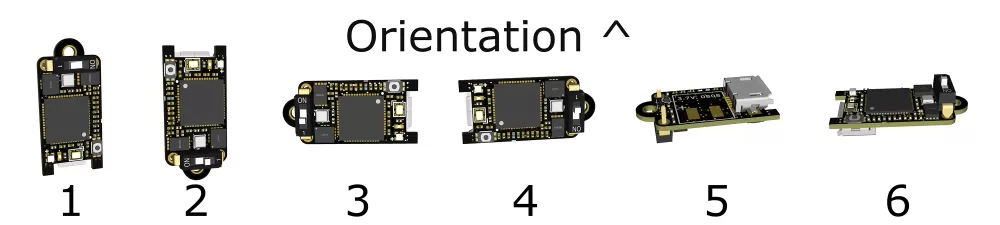
Następnie umieszczasz Nano w sześciu pozycjach, po jednej dla każdej ściany, aby mógł zmierzyć grawitację w każdym kierunku. Zawsze przechodzi przez nich w tej samej kolejności, pokazanej poniżej, więc możesz po prostu podążać za listą. Dla każdej pozycji dioda LED mówi Ci, jak idzie:
- gdy płyta nie jest jeszcze wyrównana, dioda LED pokazuje czerwień lub róż
- gdy jest trzymana prawidłowo, dioda LED zmienia się na stały cyjan i zbiera odczyty, więc trzymaj ją nieruchomo
- następnie miga zielenią trzy razy, aby potwierdzić, że pozycja została przechwycona, i przechodzi do następnej
Tak więc rytm jest taki sam za każdym razem: wyrównaj ją, aż światło stanie się cyjanowe, trzymaj nieruchomo, aż miga zielono, a następnie przejdź do następnej pozycji. Między nimi nie ma pośpiechu.
- Leżąc płasko, komponenty skierowane do góry (orientacja 5)
- Leżąc płasko, komponenty skierowane w dół (orientacja 6)
- Na boku, micro-USB po prawej stronie (orientacja 3)
- Na boku, micro-USB po lewej stronie (orientacja 4)
- Stojąc prosto, micro-USB u dołu (orientacja 1)
- Stojąc prosto, micro-USB u góry (orientacja 2)
Gdy wszystkie sześć pozycji zostaną przechwycone, Nano miga na niebiesko pięć razy i uruchamia się ponownie, więc jego dysk zniknie i pojawi się ponownie, jeśli jest podłączony. To wszystko. Wartości kalibracji są przechowywane w pamięci samego Nano i pozostają tam podczas cykli zasilania i aktualizacji oprogramowania.
Aby potwierdzić, że zadziałało, otwórz device_information.html i sprawdź, czy linia kalibracji mówi Calibrated, lub ponownie otwórz device_calibration.txt, który teraz wymienia zmierzone przesunięcia i ustawił pierwszą linię z powrotem na 0.
iWARTE, ŻEBY WIEDZIEĆ
Kalibrowanie trzeba zrobić tylko raz. Warte powtórzenia, jeśli płyta dostała twardego ciosu, lub jeśli Twoje dane lotu zaczynają pokazywać odczyty przechyłu lub orientacji, które wyglądają niezgodnie.