En las placas Rev4 y posteriores el Nano tiene un sensor de movimiento (un IMU) que mide la inclinación y rotación durante el vuelo. Calibrarlo enseña al Nano cómo se ve "nivelado e inmóvil" para tu placa particular, lo que mantiene precisas las cifras de orientación y ángulo. Toma un par de minutos, y solo necesitas hacerlo una vez, aunque puedes repetirlo en cualquier momento que desees.
iINFORMACIÓN
La calibración solo se aplica a placas Rev4 y posteriores, las que tienen el IMU instalado. Rev3 y anteriores no tienen sensor de movimiento, por lo que no hay nada que calibrar ni archivo de calibración en la unidad.
Conecta el Nano por USB para que aparezca su unidad, luego abre el archivo device_calibration.txt. Cambia el 0 en la primera línea a un 1, guarda el archivo y expulsa la unidad de manera segura. La calibración se ejecuta la próxima vez que el Nano se encienda.
Dado que tendrás que girar la placa en varias posiciones, es más fácil ejecutarla con alimentación por batería para que no haya cable en el camino: establece la bandera en 1, expulsa y desconecta, luego enciende el Nano. Comienza a calibrar inmediatamente en lugar de armarse para un vuelo, y vuelve a establecer la primera línea a 0 una vez que ha terminado. Giroscopio primero, luego el acelerómetro, y el LED te guía a través de ambos.
El giroscopio solo necesita que la placa esté completamente inmóvil. El LED brilla en rojo y tienes unos segundos para retroceder, luego toma sus lecturas durante aproximadamente diez a quince segundos. Coloca el Nano sobre algo sólido y libre de vibraciones y no lo toques. Es mejor hacer esto con el Nano en la orientación en la que pretendes volar.
Si detecta algún movimiento te advierte con una luz naranja. Si eso sucede, déjalo terminar y luego ejecuta la calibración de nuevo. Cuando el giroscopio termina, destella verde tres veces y pasa al acelerómetro.
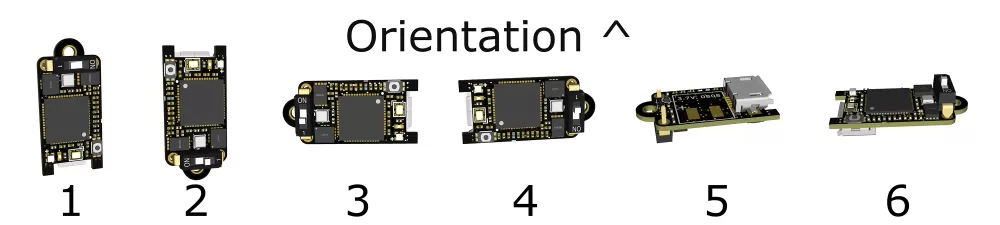
A continuación colocas el Nano en seis posiciones, una para cada cara, para que pueda medir la gravedad en todas las direcciones. Siempre las recorre en el mismo orden, que se muestra a continuación, por lo que solo puedes seguir la lista. Para cada posición el LED te dice cómo va:
- mientras la placa aún no está alineada, el LED muestra rojo o rosa
- una vez que está correctamente sostenida, el LED se vuelve un cian constante y toma sus lecturas, así que mantenlo inmóvil
- luego destella verde tres veces para confirmar que esa posición se ha capturado, y pasa a la siguiente
Entonces el ritmo es el mismo cada vez: alinéalo hasta que la luz se vuelva cian, mantén inmóvil hasta que destelle verde, luego pasa a la siguiente posición. No hay prisa entre medias.
- Acostado plano, componentes hacia arriba (orientación 5)
- Acostado plano, componentes hacia abajo (orientación 6)
- De lado, micro-USB hacia la derecha (orientación 3)
- De lado, micro-USB hacia la izquierda (orientación 4)
- De pie, micro-USB en la parte inferior (orientación 1)
- De pie, micro-USB en la parte superior (orientación 2)
Una vez que se capturan las seis posiciones, el Nano destella azul cinco veces y se reinicia a sí mismo, por lo que su unidad desaparecerá y volverá si está enchufada. Eso es todo. Los valores de calibración se almacenan en la propia memoria del Nano y permanecen allí a través de ciclos de energía y actualizaciones de firmware.
Para confirmar que funcionó, abre device_information.html y verifica que la línea de calibración diga Calibrated, o reabre device_calibration.txt, que ahora lista los desplazamientos medidos y ha vuelto a establecer la primera línea a 0.
iBUENO SABERLO
Solo necesitas calibrar una vez. Vale la pena repetirlo si la placa ha sufrido un golpe fuerte, o si tus datos de vuelo comienzan a mostrar lecturas de inclinación u orientación que se ven incorrectas.