Nas placas Rev4 e posteriores o Nano possui um sensor de movimento (um IMU) que mede inclinação e rotação durante todo o voo. Calibrá-lo ensina ao Nano como é "nivelado e imóvel" para sua placa específica, o que mantém as figuras de orientação e ângulo precisas. Leva alguns minutos, e você só precisa fazer isso uma vez, embora possa repetir a qualquer momento.
iINFORMAÇÃO
A calibração se aplica apenas às placas Rev4 e posteriores, aquelas com o IMU instalado. Rev3 e anteriores não possuem sensor de movimento, portanto não há nada para calibrar e nenhum arquivo de calibração na unidade.
Conecte o Nano via USB para que sua unidade apareça, depois abra o arquivo device_calibration.txt. Mude o 0 na primeira linha para 1, salve o arquivo e ejete com segurança a unidade. A calibração é executada na próxima vez que o Nano for ligado.
Como você estará virando a placa através de várias posições, é mais fácil executá-la com bateria para não haver cabo no caminho: defina a flag como 1, ejete e desplugue, depois ligue o Nano. Ele começa a calibrar imediatamente em vez de se preparar para um voo, e define a primeira linha de volta para 0 assim que termina. Primeiro o giroscópio, depois o acelerômetro, e o LED o guia através de ambos.
O giroscópio apenas precisa que a placa esteja completamente imóvel. O LED brilha em vermelho e você tem alguns segundos para se afastar, depois ele coleta suas medições durante cerca de dez a quinze segundos. Coloque o Nano em algo sólido e livre de vibração e não o toque. É melhor fazer isso com o Nano na orientação que você pretende voar.
Se detectar qualquer movimento, ele o avisa com uma luz laranja. Se isso acontecer, deixe terminar e execute a calibração novamente. Quando o giroscópio terminar, pisca verde três vezes e passa para o acelerômetro.
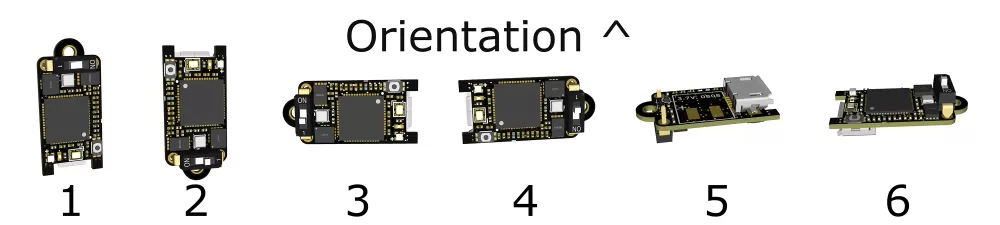
Em seguida, você coloca o Nano em seis posições, uma para cada face, para que ele possa medir a gravidade em todas as direções. Sempre funciona na mesma ordem, mostrada abaixo, então você pode apenas seguir a lista. Para cada posição o LED informa como está progredindo:
- enquanto a placa ainda não está alinhada, o LED mostra vermelho ou rosa
- uma vez que está mantida corretamente o LED fica um ciano constante e coleta suas medições, então mantenha imóvel
- depois pisca verde três vezes para confirmar que essa posição foi capturada e passa para a próxima
Então o ritmo é o mesmo cada vez: alinhe até a luz ficar ciano, mantenha imóvel até o verde piscar, depois mude para a próxima posição. Não há pressa entre elas.
- Deitada plana, componentes para cima (orientação 5)
- Deitada plana, componentes para baixo (orientação 6)
- De lado, micro-USB para a direita (orientação 3)
- De lado, micro-USB para a esquerda (orientação 4)
- Em pé, micro-USB na parte inferior (orientação 1)
- Em pé, micro-USB na parte superior (orientação 2)
Uma vez que todas as seis posições são capturadas, o Nano pisca azul cinco vezes e reinicia a si mesmo, então sua unidade desaparecerá e reaparecerá se estiver conectada. Pronto. Os valores de calibração são armazenados na memória do próprio Nano e permanecem lá através de ciclos de energia e atualizações de firmware.
Para confirmar que funcionou, abra device_information.html e verifique se a linha de calibração lê Calibrated, ou reabra device_calibration.txt, que agora lista os offsets medidos e definiu a primeira linha de volta para 0.
iBOM SABER
Você só precisa calibrar uma vez. Vale a pena refazer se a placa sofreu um impacto forte, ou se seus dados de voo começarem a mostrar leituras de inclinação ou orientação que pareçam incorretas.