Nano przechowuje wszystkie ustawienia edytowalne przez użytkownika w jednym pliku o nazwie device_settings.txt, w zwykłym formacie JSON. Edytujesz go bezpośrednio przez USB, nie jest wymagana żadna aplikacja. Ta strona zawiera opis formatu pliku, jak go bezpiecznie edytować i co każde ustawienie robi. Zwróć uwagę, że wszystkie wysokości i odległości podane są w metrach, nie stopach.
Dokumentacja dla firmware'u 1.52. Starsze wersje firmware'u mogą się nieznacznie różnić; twoja dokładna wersja jest wyświetlana w device_information.html.
- Wyłącz przełącznik zasilania Nano, a następnie podłącz go do komputera, laptopa, tabletu lub smartfona za pomocą kabla USB. Montuje się jako dysk ALTCLOUD.
- Otwórz
device_settings.txtw dowolnym edytorze tekstu. - Zmień interesujące Cię wartości. Zachowaj strukturę JSON - każdy wpis wymaga cudzysłowów, dwukropka między nazwą a wartością oraz przecinka po nim (z wyjątkiem ostatniego), wszystko wewnątrz nawiasów
{ }. Wartości tekstowe (tagi) pozostają w cudzysłowach; liczby piszemy bez cudzysłowów. - Zapisz plik, a następnie bezpiecznie wynieś dysk.
- Wykonaj ponowny rozruch Nano (odłącz USB i włącz go, lub odłącz i podłącz ponownie). Ustawienia są odczytywane i stosowane przy następnym włączeniu.
!WAŻNE
Jeśli plik zawiera błąd JSON lub wartość spoza zakresu albo nieobsługiwaną, Nano odrzuca cały plik i przepisuje go wartościami domyślnymi przy następnym włączeniu. Jeśli Twoje zmiany wydają się zniknęły, sprawdź literówkę lub wartość spoza dozwolonego zakresu. Zawsze pozostaw "device": "NanoV1" niezmienione; jeśli nie brzmi jako NanoV1, żadne Twoje ustawienia nie będą zastosowane.
Nowy Nano jest dostarczany z tymi wartościami:
{
"device_tag": "MyNano",
"competitor_tag": "",
"device": "NanoV1",
"emode": 1,
"factoryreset": 0,
"hybrid_mode": 3,
"launch_detect": 30,
"launch_protection": 1500,
"led_brightness": 5,
"maintain_power": 1,
"max_samples": 24000,
"orientation": 1,
"recording_stop": 1,
"sample_ratio": 1,
"sample_speed": 100,
"startup_lock": 0,
"sync_enable": 2
}
Ustawienia oznaczone Rev 4+ opierają się na IMU i dotyczą tylko płyt rewizji 4 i nowszych.
iTe pola są wbudowane w hash weryfikacyjny
Kiedy Nano rejestruje lot, tag urządzenia i tag konkurenta są zapisywane w dzienniku i włączane do jego hash'u weryfikacyjnego SHA-256 HMAC w tym momencie. Z tego powodu zapisany dziennik nie może być zmieniony później, nawet te pola tagów, i nadal przejść sprawdzenie weryfikacji lub być przesłany do Altimeter Cloud. Każdy dziennik lotu musi być przechowywany dokładnie tak, jak napisał go Nano. Edycja device_settings.txt jest w porządku; zmienia tylko wartości używane dla przyszłych lotów.
device_tag Domyślnie "MyNano" · tekst, nie może być pusty
Etykieta dla tego altimetru. Jest zapisywana w nagłówku Twoich logów lotu CSV i, jeśli przesliesz log do Altimeter Cloud, zastosowana do strony lotu tam.
competitor_tag Domyślnie "" (pusty) · tekst, do 32 znaków
Opcjonalne pole na twój numer konkursu FAI lub NAR. Zawarte w nagłówku CSV i w hash'u weryfikacji danych. Pozostaw puste, jeśli nie konkurujesz.
device Domyślnie "NanoV1" · nie zmieniaj
Identyfikuje typ urządzenia i wybiera algorytm używany do wygenerowania hash'u weryfikacyjnego w CSV, którego Altimeter Cloud używa do potwierdzenia, że log jest autentyczny. Jeśli to nie jest "NanoV1", Twoje ustawienia nie będą zastosowane.
launch_detect Domyślnie 30 · zakres 1 do 199 m
Wysokość w metrach ponad ostatnim poziomem gruntu, którą altimetr musi przejść, zanim zacznie nagrywać lot. Wartości od 25 do 50 m nadają się do większości zastosowań.
startup_lock Domyślnie 0 · zakres 0 do 999 s
Uniemożliwia detekcję startu, aż upłynie ta liczba sekund od włączenia. 0 wyłącza to. Przydatne, jeśli potrzebujesz czasu na zamknięcie rakiety po włączeniu.
launch_protection Domyślnie 1500 · zakres 0 do 10000 mG Rev 4+
Próg ochrony przed przypadkowym startem w milli-G. Przyspieszenie musi przekroczyć tę wartość w co najmniej 6 z ostatnich 100 próbek, zanim nagrywanie może się rozpocząć, co uniemożliwia porywom wiatru lub zdejmowaniu owiewu spustoszenia fałszywego startu. 1500 = 1,5 G. Ustaw na 0, aby wyłączyć.
recording_stop Domyślnie 1 · 1, 2 lub 3
Kiedy nagrywanie się kończy. Nano zawsze też zatrzymuje się przy niskim baterii lub gdy osiągnie max_samples. 1 = zatrzymaj się po około 9 sekundach (450 próbkach) stabilnej wysokości; 2 = po około 18 sekundach (900 próbkach); 3 = zatrzymaj się tylko przy max_samples.
max_samples Domyślnie 24000 · zakres 4000 do 24000
Maksymalna liczba próbek rejestrowanych, zanim dziennik automatycznie się zatrzyma.
sample_speed Domyślnie 100 · 50 lub 100 (Hz)
Szybkość pętli czujnika. Wyższa szybkość przechwytuje więcej szczegółów, ale zużywa więcej baterii. Przy 100 Hz z sample_ratio 1 maksymalne nagranie lotu wynosi około 4 minut; przy 50 Hz to około 8 minut.
Domyślnie hybrid_mode jest ustawiony na 3, co znacznie rozciąga to okno. Wznoszenie i momenty wokół apogeum i lądowania są utrzymywane przy pełnych 100 Hz, podczas gdy długi zjazd jest rejestrowany na jedną trzecią szybkości. Biorąc typowy przypadek około 15 sekund przy pełnej szybkości (mniej więcej 1 500 próbek) i resztę budżetu 24 000 próbek spędzony na zjeździe na jeden z trzech, ustawienia domyślne mogą przechwycić lot trwający do około 11,5 minut, w porównaniu z około 4 minutami bez trybu hybrydowego. Dłuższy lub krótszy etap pełnej szybkości zmieni tę liczbę.
sample_ratio Domyślnie 1
Jak często odczyty są zapisywane w dzienniku. Altimetr zawsze działa i oblicza przy pełnej sample_speed (50 lub 100 Hz); to ustawienie zmienia tylko to, jak często te bieżące wartości są zapisywane w dzienniku lotu. 1 = zapisz każdą próbkę, 2 = każdą drugą, 3 = każdą trzecią itd., co jest prostym sposobem na przedłużenie czasu nagrywania. Dziennik zawsze działa z minimum 10 Hz, więc stosunek jest ograniczony do 10, gdy sample_speed wynosi 100 i do 5, gdy wynosi 50; wszystko, co wyżej wpisujesz, jest cicho ograniczane do tego.
hybrid_mode Domyślnie 3 · 0, 3 lub 5
Adaptacyjne próbkowanie dla długich lotów. 0 = wyłączone (zawsze używaj sample_ratio). 3 = spadnij do próbkowania 1-na-3 dziesięć sekund po apogeum; 5 = spadnij do 1-na-5. W drodze w dół, poniżej 20 m nad ziemią powraca do pełnej szybkości, aby precyzyjnie przechwycić lądowanie, a następnie spadnie z powrotem do trybu hybrydowego pięć sekund po wylądowaniu. To utrzymuje pełny szczegół podczas wznoszenia i lądowania, jednocześnie rozciągając czas nagrywania na długie zniżki ze spadochronem.
emode Domyślnie 1 · 1 lub 2
Poziom oszczędzania energii dla dłuższego czasu pracy baterii. 1 = normalne. 2 = maksymalne oszczędzanie, używające odczytywania wsadowego FIFO o niższej szybkości w stanie bezczynności, aby zmniejszyć cykle przebudzenia CPU o połowę. Oba tryby natychmiast przełączają się do pełnej wydajności 100 Hz w momencie wykrycia skoku przyspieszenia lub startu. Oszczędzanie energii opiera się na IMU, dlatego ma największy wpływ na płyty rewizji 4 i nowsze.
Jak działa szybkość bezczynności (pokazana przy 100 Hz sample_speed)
emode 1 pracuje w trybie bezczynności na 50 Hz. Bump ruchu krótko przeskakuje go do 100 Hz do sprawdzenia; bez startu spada z powrotem do 50 Hz. Przy starcie blokuje się na 100 Hz dla całego lotu.
emode 2 zachowuje się tak samo, ale CPU budzi się tylko na 25 Hz, aby zaoszczędzić więcej energii. Nadal loguje przy pełnych 50 Hz przed startem: za każdym razem, gdy się budzi, odczytuje każdą próbkę zbuforowaną od ostatniego sprawdzenia, więc żadne dane nie są tracone. Nadal przeskakuje prosto do 100 Hz przy starcie.
Przeskok z powrotem do pełnej szybkości jest bardzo czuły, więc w prawie wszystkich naszych testach początkowy ciąg zapłonnika wyzwala go natychmiast i cały spalin silnika jest przechwytywany przy pełnych 100 Hz od samego początku. Maksimum, które kiedykolwiek nagrałbyś przy szybkości bezczynności przed przeskokiem, to jeden cykl bezczynności: około 20 ms w emode 1, lub około 40 ms w emode 2.
maintain_power Domyślnie 1 · 0 lub 1
Co Nano robi po zapisaniu lotu. 0 = wyłącz czujnik i diodę LED i uśpij aż do ponownego włączenia. 1 = zostań włączony i mrugaj zarejestrowaną wysokością apogeum na diodzie stanu (patrz poniżej), powtarzając się, aż podłączysz USB lub wykonasz ponowny rozruch. To zarówno potwierdza, że lot został zarejestrowany, jak i pozwala odczytać apogeum bez komputera.
Odczyt błysków wysokości (gdy ustawiono na 1)
Nano mruga wysokością apogeum w metrach po jednej cyfrze na raz, od najstarszej cyfry, z pominięciem zer wiodących. Każde miejsce cyfry ma swój własny kolor:
Dziesiątki tysięcy Tysiące Setki Dziesiątki Jedności
- Długi biały błysk oznacza początek sekwencji.
- Liczba błysków w kolorze to wartość tej cyfry (1 do 9).
- Cyfra zera jest pokazywana jako jeden długi, przyćmiony błysk tego koloru.
- Ciemnoniebieski błysk oddziela jedną cyfrę od następnej.
- Po ostatniej cyfrze jest krótka pauza, potem się powtarza. Podłącz USB lub wykonaj ponowny rozruch, aby zatrzymać.
Przykład, apogeum 1 250 m: purpurowy raz, zielony dwa razy, cyjan pięć razy, a następnie jeden długi przyćmiony żółty błysk dla zera, z ciemnoniebieskim błyskiem między każdą cyfrą.
led_brightness Domyślnie 5 · zakres 1 do 10
Jasność diody LED stanu, która także oszczędza trochę energii, gdy jest przyćmiona. Zwróć uwagę, że skala działa w odwrotnym kierunku do tego, czego możesz oczekiwać: 1 jest najjaśniejszy, a 10 jest najciemniejszy.
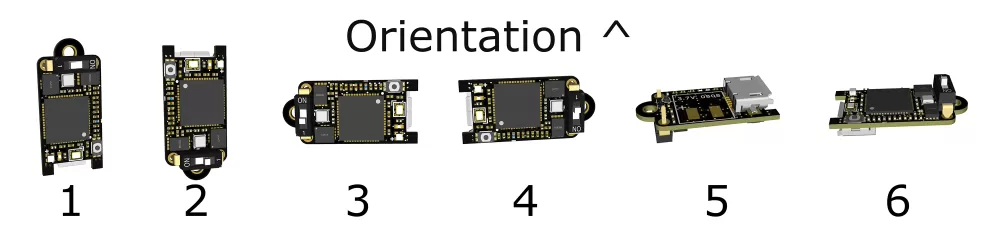
orientation Domyślnie 1 · 1 do 6 Rev 4+
Mówi Nano, jak jest zamontowany w rakiecie, aby mógł prawidłowo obliczyć kąty lotu. Dopasuj liczbę do diagramu orientacji, gdzie zaznaczony kierunek (strzałka ^) wskazuje w górę w kierunku głowicy:
- 1 = stoi prosto, ściana płytki w twoją stronę, micro-USB na dnie (domyślnie)
- 2 = stoi prosto, ściana płytki w twoją stronę, micro-USB na górze
- 3 = na boku, ściana płytki w twoją stronę, micro-USB w prawo
- 4 = na boku, ściana płytki w twoją stronę, micro-USB w lewo
- 5 = leży płasko, ściana płytki (strona komponentu) skierowana w górę
- 6 = leży płasko, ściana płytki (strona komponentu) skierowana w dół
sync_enable Domyślnie 2 · 0, 1 lub 2 Rev 4+
Wyrównuje strumienie danych ciśnienia i IMU. Filtrowanie powoduje, że wysokość ciśnienia nieznacznie opóźnia się w stosunku do akcelerometru; z tym włączonym (2) firmware mierzy to przesunięcie przy starcie i przesuwa dane akcelerometru, aby się wyrównały. 0 lub 1 to wyłącza.
factoryreset Domyślnie 0 · 0 lub 1
Ustaw na 1, aby przeformatować system plików i przepisać każde ustawienie z powrotem na domyślne przy następnym włączeniu. Wraca do 0 później.
Za każdym razem, gdy się włączy, Nano odczytuje device_settings.txt, stosuje to, a następnie przepisuje plik z wartościami, które faktycznie użyło. To ułatwia potwierdzenie, że Twoje edycje zostały zaakceptowane:
- Zapisz swoje edycje i wynieś dysk.
- Odłącz Nano od USB i podłącz go z powrotem. To restartuje go, aby odczytał plik na nowo.
- Otwórz ponownie
device_settings.txt. Jeśli Twoje wartości są nadal tam, zostały zastosowane. Jeśli plik powrócił do ustawień domyślnych, zawierał błąd JSON lub wartość spoza dozwolonego zakresu, więc sprawdź to względem zakresów powyżej i spróbuj ponownie.
Dla zgodności FAI kilka wartości, które starszy firmware udostępniał, są teraz stałe w firmware'u i nie mogą być zmieniane. Jeśli dodasz którekolwiek z tych kluczy do pliku, są po prostu ignorowane (i nie będą samodzielnie powodować resetowania). Ustalone wartości nadal są zapisywane w nagłówku CSV dla odniesienia:
- Ciśnienie referencyjne na poziomie morza, ustalone na 1013,25 hPa (standard ISA).
- Ustalona temperatura, ustalona na 15 °C (standard ISA).
- Użycie temperatury, wyłączone.
- Filtr IIR, ustalony na 7.
- Filtr Kalmana, ustalony na 2.
- Nadpróbkowanie czujnika, ustalona na rewizję hardware'u (16 na Rev 4+ z BMP581, 8 na Rev 1 do 3 z BMP390).
Starsze pliki lub dokumentacja ustawień mogą nadal wymieniać klucze takie jak fixed_temp, sealevel, use_temperature, iirfilter lub kalmanfilter, te nie mają już żadnego efektu.