Op Rev4 en latere borden beschikt de Nano over een motion sensor (een IMU) die kanteling en rotatie tijdens de vlucht meet. Het kalibreren ervan leert de Nano wat "horizontaal en stil" voor uw specifieke bord betekent, wat de oriëntatie- en hoekcijfers nauwkeurig houdt. Het duurt een paar minuten, en u hoeft het maar één keer te doen, hoewel u het op elk moment kunt herhalen.
iINFO
Kalibratie is alleen van toepassing op Rev4 en latere borden, degene met de geïnstalleerde IMU. Rev3 en eerder hebben geen motion sensor, dus er is niets om te kalibreren en geen kalibratiebestand op de schijf.
Verbind de Nano via USB zodat de schijf ervan verschijnt, en open vervolgens het bestand device_calibration.txt. Wijzig de 0 op de allereerste regel in een 1, sla het bestand op en werp de schijf veilig uit. De kalibratie wordt uitgevoerd wanneer de Nano de volgende keer ingeschakeld wordt.
Omdat u het bord in meerdere posities zult draaien, is het het gemakkelijkst om het op batterijvermogen uit te voeren zodat er geen kabel in de weg zit: zet de vlag op 1, werp uit en ontkoppel, schakel vervolgens de Nano in. Het begint meteen met kalibreren in plaats van zich voor te bereiden op een vlucht, en het zet de eerste regel na afloop weer op 0 voor u. Eerst gyroscoop, dan de accelerometer, en de LED geleidt u door beide.
De gyroscoop heeft alleen nodig dat het bord volledig stil is. De LED gloedt rood en u hebt een paar seconden om terug te stappen, vervolgens meet het ongeveer tien tot vijftien seconden lang. Plaats de Nano op iets solids en vrij van trillingen en raak het niet aan. Het is het beste om dit te doen met de Nano in de oriëntatie waarin u van plan bent te vliegen.
Als het enige beweging detecteert, waarschuwt het u met een oranje licht. Laat het dan afmaken en voer de kalibratie opnieuw uit. Wanneer de gyroscoop gereed is, knippert het drie keer groen en gaat het verder met de accelerometer.
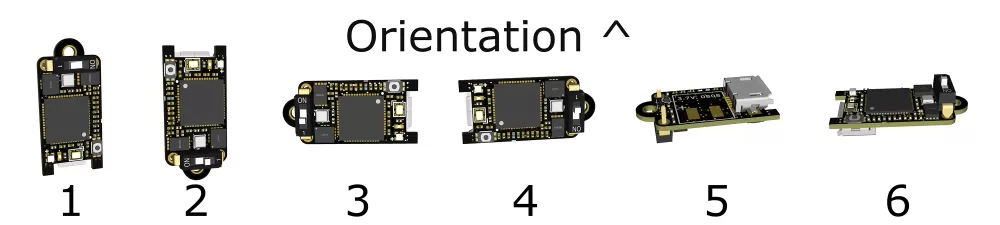
Vervolgens plaatst u de Nano in zes posities, één voor elk oppervlak, zodat het de zwaartekracht in elke richting kan meten. Het werkt ze altijd in dezelfde volgorde door, hieronder weergegeven, dus u kunt gewoon de lijst volgen. Voor elke positie vertelt de LED u hoe het gaat:
- terwijl het bord nog niet correct is uitgelijnd, toont de LED rood of roze
- zodra het correct wordt vastgehouden, wordt de LED een stabiel cyaan en neemt het metingen, dus houd het stil
- het knippert vervolgens drie keer groen om te bevestigen dat die positie is vastgelegd, en gaat naar de volgende
Het ritme is dus elke keer hetzelfde: lijn het uit totdat het licht cyaan wordt, houd stil totdat het groen knippert, en ga naar de volgende positie. Er is geen haast tussentijds.
- Liggend plat, onderdelen naar boven (oriëntatie 5)
- Liggend plat, onderdelen naar beneden (oriëntatie 6)
- Op zijn kant, micro-USB naar rechts (oriëntatie 3)
- Op zijn kant, micro-USB naar links (oriëntatie 4)
- Rechtop staand, micro-USB onderaan (oriëntatie 1)
- Rechtop staand, micro-USB bovenaan (oriëntatie 2)
Zodra alle zes posities zijn vastgelegd, knippert de Nano vijf keer blauw en herstart het zichzelf, dus de schijf verdwijnt en verschijnt weer als het is aangesloten. Dat is alles. De kalibratiewaarden worden opgeslagen in het eigen geheugen van de Nano en blijven daar bij stroompauzes en firmware-updates.
Om te bevestigen dat het werkte, open device_information.html en controleer of de kalibratieregel Calibrated (Gekalibreerd) aangeeft, of open device_calibration.txt opnieuw, wat nu de gemeten offsets opsomt en de eerste regel op 0 heeft ingesteld.
iGOED OM TE WETEN
U hoeft slechts eenmaal te kalibreren. Het is de moeite waard om opnieuw uit te voeren als het bord een harde klap heeft gehad, of als uw vlieggegevens beginnen kantelings- of oriëntatielectijfers te tonen die er fout uitzien.