Le Nano stocke tous ses paramètres modifiables par l'utilisateur dans un seul fichier appelé device_settings.txt, au format JSON en texte brut. Vous le modifiez directement via USB, aucune application n'est requise. Cette page couvre le format du fichier, comment l'éditer en toute sécurité, et ce que chaque paramètre fait. Notez que toutes les hauteurs et distances sont données en mètres, pas en pieds.
Référence pour le firmware 1.52. Les versions antérieures du firmware peuvent différer légèrement ; votre version exacte est affichée dans device_information.html.
- Avec l'interrupteur d'alimentation du Nano éteint, connectez-le à votre PC, ordinateur portable, tablette ou téléphone intelligent avec un câble USB. Il se monte en tant que lecteur ALTCLOUD.
- Ouvrez
device_settings.txtdans n'importe quel éditeur de texte brut. - Modifiez les valeurs que vous souhaitez. Conservez la structure JSON intacte, chaque entrée a besoin de ses guillemets, des deux points entre le nom et la valeur, et une virgule après (sauf la dernière), tous à l'intérieur des accolades environnantes
{ }. Les valeurs texte (les étiquettes) restent entre guillemets ; les nombres s'écrivent sans guillemets. - Enregistrez le fichier, puis éjectez le lecteur en toute sécurité.
- Redémarrez le Nano (débranchez l'USB et allumez-le, ou débranchez et rebranchez). Les paramètres sont lus et appliqués au prochain démarrage.
!IMPORTANT
Si le fichier contient une erreur JSON, ou une valeur hors limites ou non supportée, le Nano rejette le fichier entier et le réécrit avec les valeurs par défaut au prochain démarrage. Donc si vos modifications semblent avoir disparu, vérifiez une faute de frappe ou une valeur en dehors de la plage autorisée. Laissez toujours "device": "NanoV1" inchangé, s'il ne lit pas NanoV1, aucun de vos paramètres n'est appliqué.
Un Nano neuf est livré avec ces valeurs :
{
"device_tag": "MyNano",
"competitor_tag": "",
"device": "NanoV1",
"emode": 1,
"factoryreset": 0,
"hybrid_mode": 3,
"launch_detect": 30,
"launch_protection": 1500,
"led_brightness": 5,
"maintain_power": 1,
"max_samples": 24000,
"orientation": 1,
"recording_stop": 1,
"sample_ratio": 1,
"sample_speed": 100,
"startup_lock": 0,
"sync_enable": 2
}
Les paramètres marqués Rév 4+ s'appuient sur l'IMU et ne s'appliquent qu'aux cartes de révision 4 et ultérieure.
iCes champs sont intégrés dans le hachage de vérification
Lorsque le Nano enregistre un vol, l'étiquette du dispositif et l'étiquette du concurrent sont écrites dans le journal et fusionnées dans son hachage de vérification SHA-256 HMAC à ce moment-là. Pour cette raison, un journal enregistré ne peut pas être modifié après, pas même ces champs d'étiquette, et doit toujours réussir une vérification ou être téléchargé sur le Altimeter Cloud. Chaque journal de vol doit être conservé exactement tel que le Nano l'a écrit. Éditer device_settings.txt lui-même est correct ; il change seulement les valeurs utilisées pour les vols futurs.
device_tag Défaut « MyNano » · texte, ne doit pas être vide
Une étiquette pour cet altimètre. Elle est écrite dans l'en-tête de vos journaux de vol CSV et, si vous téléchargez un journal sur le Altimeter Cloud, elle est appliquée à la page de vol là aussi.
competitor_tag Défaut « » (vide) · texte, jusqu'à 32 caractères
Champ optionnel pour votre numéro de compétition FAI ou NAR. Inclus dans l'en-tête CSV et dans le hachage de vérification des données. Laissez-le vide si vous ne participez pas à une compétition.
device Défaut « NanoV1 » · ne pas modifier
Identifie le type de dispositif et sélectionne l'algorithme utilisé pour générer le hachage de vérification dans le CSV, que le Altimeter Cloud utilise pour confirmer qu'un journal est authentique. Si ce n'est pas « NanoV1 », vos paramètres ne seront pas appliqués.
launch_detect Défaut 30 · plage 1 à 199 m
Hauteur en mètres au-dessus de la pression au niveau du sol récente que l'altimètre doit franchir avant de commencer à enregistrer un vol. Les valeurs de 25 à 50 m conviennent à la plupart des usages.
startup_lock Défaut 0 · plage 0 à 999 s
Empêche la détection de lancement jusqu'à ce que ce nombre de secondes se soit écoulé depuis la mise sous tension. 0 le désactive. Utile si vous avez besoin de temps pour fermer la fusée après l'allumage.
launch_protection Défaut 1500 · plage 0 à 10000 mG Rév 4+
Seuil de protection contre le lancement accidentel en milli-G. L'accélération doit dépasser cette valeur dans au moins 6 des 100 derniers échantillons avant que l'enregistrement puisse commencer, ce qui empêche les rafales de vent ou le retrait de la coiffe de déclenchement d'un faux lancement. 1500 = 1,5 G. Mettez à 0 pour désactiver.
recording_stop Défaut 1 · 1, 2 ou 3
Quand l'enregistrement s'arrête. Le Nano s'arrête toujours aussi en cas de batterie faible ou quand il atteint max_samples. 1 = arrêt après environ 9 secondes (450 échantillons) d'altitude stable ; 2 = après environ 18 secondes (900 échantillons) ; 3 = arrêt uniquement à max_samples.
max_samples Défaut 24000 · plage 4000 à 24000
Le nombre maximum d'échantillons enregistrés avant que le journal s'arrête automatiquement.
sample_speed Défaut 100 · 50 ou 100 (Hz)
La fréquence de la boucle de capteur. Un taux plus élevé capture plus de détails mais utilise plus de batterie. À 100 Hz avec sample_ratio 1, l'enregistrement de vol maximum est d'environ 4 minutes ; à 50 Hz, c'est environ 8 minutes.
Par défaut, hybrid_mode est défini sur 3, ce qui prolonge beaucoup cette fenêtre. La montée et les moments autour de l'apogée et de l'atterrissage sont conservés au 100 Hz complet, tandis que la longue descente est enregistrée à un tiers du taux. En prenant un cas typique d'environ 15 secondes au taux complet (environ 1 500 échantillons) et le reste du budget de 24 000 échantillons dépensé sur la descente à un sur trois, les paramètres par défaut peuvent capturer un vol durant jusqu'à environ 11,5 minutes, comparé à environ 4 minutes sans mode hybride. Une phase au taux complet plus longue ou plus courte déplacera ce chiffre.
sample_ratio Défaut 1
À quelle fréquence les lectures sont écrites dans le journal. L'altimètre s'exécute toujours et calcule à la pleine sample_speed (50 ou 100 Hz) ; ce paramètre change uniquement la fréquence à laquelle ces valeurs actuelles sont enregistrées dans le journal de vol. 1 = enregistrer chaque échantillon, 2 = un sur deux, 3 = un sur trois, etc., ce qui est un moyen simple d'étendre le temps d'enregistrement. Le journal s'exécute toujours à un minimum de 10 Hz, donc le ratio est limité à 10 quand sample_speed est 100 et à 5 quand il est 50 ; tout ce que vous entrez au-delà est silencieusement réduit à cela.
hybrid_mode Défaut 3 · 0, 3 ou 5
Échantillonnage adaptatif pour les vols longs. 0 = désactivé (utilise toujours sample_ratio). 3 = réduire à un échantillonnage sur 3 dix secondes après l'apogée ; 5 = réduire à un sur 5. En descente, en dessous de 20 m au-dessus du sol, il revient au taux complet pour capturer l'atterrissage avec précision, puis revient au ratio hybride cinq secondes après le toucher. Cela conserve tous les détails pendant l'ascension et l'atterrissage tout en prolongeant le temps d'enregistrement sur les longues descentes en parachute.
emode Défaut 1 · 1 ou 2
Niveau d'économie d'énergie pour une plus longue durée de batterie. 1 = normal. 2 = économie maximale, utilisant la lecture par lots FIFO à taux inférieur en veille pour réduire de moitié les cycles de réveil du CPU. Les deux modes passent instantanément aux performances 100 Hz complètes dès qu'une augmentation d'accélération ou un lancement est détecté. L'économie d'énergie dépend de l'IMU, donc elle a le plus d'effet sur les cartes de révision 4 et ultérieure.
Comment fonctionne la vitesse de veille (affichée à 100 Hz sample_speed)
emode 1 veille à 50 Hz. Un mouvement fait brièvement sauter à 100 Hz pour vérifier ; sans lancement, il retombe à 50 Hz. Au lancement, il se verrouille à 100 Hz pour tout le vol.
emode 2 se comporte de la même façon mais le CPU ne se réveille qu'à 25 Hz pour économiser plus d'énergie. Il enregistre quand même au complet 50 Hz avant le lancement : chaque fois qu'il se réveille, il lit chaque échantillon mis en buffer depuis la dernière vérification, donc aucune donnée n'est perdue. Il passe quand même directement à 100 Hz au lancement.
Le saut à vitesse complète est très sensible, donc dans presque tous nos tests, la poussée initiale de l'allumeur le déclenche instantanément et tout le brûlage du moteur est capturé au 100 Hz complet dès le départ. Le maximum que vous enregistreriez jamais au taux de veille avant le saut est un cycle de veille : environ 20 ms en emode 1, ou environ 40 ms en emode 2.
maintain_power Défaut 1 · 0 ou 1
Ce que le Nano fait après l'enregistrement d'un vol. 0 = éteindre le capteur et la LED, puis se mettre en veille jusqu'à ce que vous le redémarriez. 1 = rester allumé et faire clignoter l'altitude d'apogée enregistrée sur la LED d'état (voir ci-dessous), en répétant jusqu'à ce que vous connectiez l'USB ou redémarriez. Cela confirme qu'un vol a été enregistré et vous permet de lire l'apogée sans ordinateur.
Lire les clignotements d'altitude (quand réglé sur 1)
Le Nano fait clignoter la hauteur d'apogée en mètres un chiffre à la fois, le chiffre le plus significatif en premier, en sautant les zéros non significatifs. Chaque place de chiffre a sa propre couleur :
10 000s 1 000s 100s 10s 1s
- Un long clignotement blanc marque le début de la séquence.
- Le nombre de clignotements dans une couleur est la valeur de ce chiffre (1 à 9).
- Un chiffre zéro est affiché comme un long clignotement faible de cette couleur.
- Un clignotement bleu foncé sépare un chiffre du suivant.
- Après le dernier chiffre, il y a une courte pause, puis il recommence. Connectez l'USB ou redémarrez pour arrêter.
Exemple, une apogée de 1 250 m : violet une fois, vert deux fois, cyan cinq fois, puis un long clignotement faible jaune pour le zéro, avec un clignotement bleu foncé entre chaque chiffre.
led_brightness Défaut 5 · plage 1 à 10
Luminosité de la LED d'état, ce qui économise aussi un peu d'énergie quand elle est assombrie. Notez que l'échelle fonctionne à l'inverse de ce que vous pourriez attendre : 1 est le plus lumineux et 10 est le plus faible.
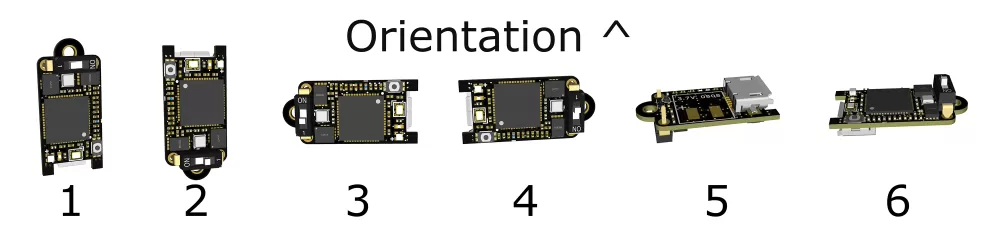
orientation Défaut 1 · 1 à 6 Rév 4+
Indique au Nano comment il est monté dans la fusée afin qu'il puisse déterminer correctement les angles de vol. Associez le nombre au diagramme d'orientation, où la direction marquée (la flèche ^) pointe vers le haut vers la coiffe :
- 1 = debout droit, face de la carte vers vous, micro-USB en bas (par défaut)
- 2 = debout droit, face de la carte vers vous, micro-USB en haut
- 3 = sur le côté, face de la carte vers vous, micro-USB à droite
- 4 = sur le côté, face de la carte vers vous, micro-USB à gauche
- 5 = à plat, face de la carte (côté composant) vers le haut
- 6 = à plat, face de la carte (côté composant) vers le bas
sync_enable Défaut 2 · 0, 1 ou 2 Rév 4+
Aligne les flux de données de pression et d'IMU. Le filtrage fait que l'altitude de la pression s'affaisse légèrement derrière l'accéléromètre ; avec cela activé (2), le firmware mesure ce décalage au lancement et décale les données de l'accéléromètre pour les aligner. 0 ou 1 le désactive.
factoryreset Défaut 0 · 0 ou 1
Réglez sur 1 pour reformater le système de fichiers et réécrire chaque paramètre à sa valeur par défaut au prochain démarrage. Il revient à 0 après.
Chaque fois qu'il s'allume, le Nano lit device_settings.txt, l'applique, puis réécrit le fichier avec les valeurs qu'il a réellement utilisées. Cela facilite la confirmation que vos modifications ont été acceptées :
- Enregistrez vos modifications et éjectez le lecteur.
- Débranchez le Nano de l'USB et rebranchez-le. Cela le redémarre pour qu'il relise le fichier.
- Rouvrez
device_settings.txt. Si vos valeurs y sont toujours, elles ont été appliquées. Si le fichier a revenu aux valeurs par défaut, il contenait une erreur JSON ou une valeur en dehors de la plage autorisée, donc vérifiez-la par rapport aux plages ci-dessus et réessayez.
Pour la conformité FAI, plusieurs valeurs que les versions antérieures du firmware exposaient sont maintenant fixes dans le firmware et ne peuvent plus être modifiées. Si vous ajoutez l'une de ces clés au fichier, elles sont simplement ignorées (et ne causent pas, à elles seules, une réinitialisation). Les valeurs fixes sont toujours écrites dans l'en-tête CSV à titre informatif :
- Pression de référence au niveau de la mer, fixée à 1013,25 hPa (norme ISA).
- Température fixe, fixée à 15 °C (norme ISA).
- Utilisation de la température, désactivée.
- Filtre IIR, fixé à 7.
- Filtre de Kalman, fixé à 2.
- Sur-échantillonnage du capteur, fixé par révision matérielle (16 sur Rév 4+ avec le BMP581, 8 sur Rév 1 à 3 avec le BMP390).
Les fichiers de paramètres ou la documentation plus anciens peuvent toujours lister des clés telles que fixed_temp, sealevel, use_temperature, iirfilter ou kalmanfilter, celles-ci n'ont plus aucun effet.